×
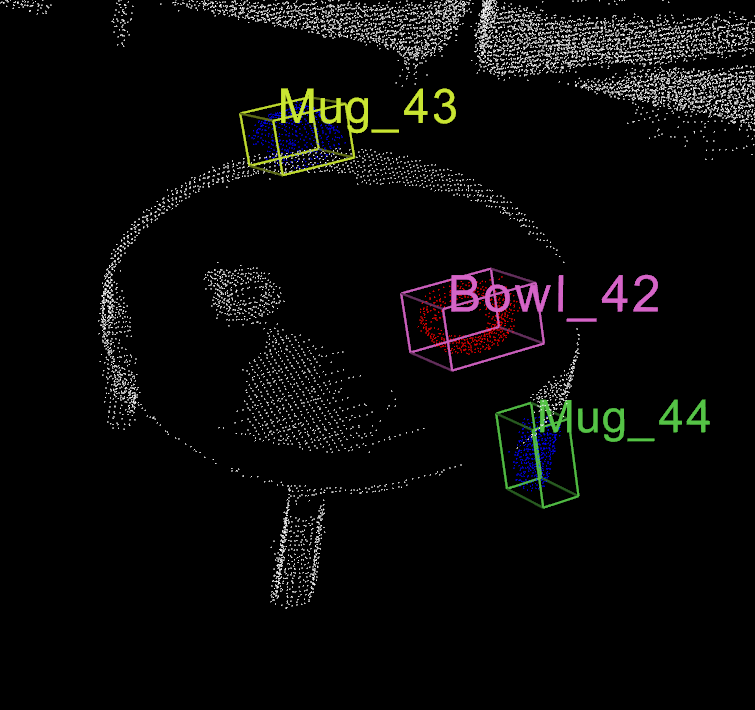
Object Detection and Recognition in 3D Point Cloud scene using Lidar data .
Implementing a 3D object detection framework for Boston dynamics ATLAS using its multisense head as perception sensor
for applications dealing with robot perception.
● Developed a ROS package for point clouds with segmentation node (using euclidean distance clustering) and an action
server which implements viewpoint feature histogram (VFH) and SVM classifier (tested on Washington 3D dataset).
● Currently working on Multi Viewpoint Convolutional Neural Networks (MVCNN) and 3D-CNN to replace feature descriptor
and SVM from the pipeline and improve the accuracy of the system.